


Objectives
The work package aims to demonstrate and evaluate the overall results of the exploration of robotic morphology and morphosis. In summary, we will carry out three research demonstrations during the project. In each demonstration, two robots will be exhibited in a unknown indoor and outdoor environments, with a range of surfaces, layouts, and terrains.
Current Activities
2013 Third Locomorph Robot Demo
During the last robot demonstration in 2013 at the Technische Universität Darmstadt we investigated the behaviour of the SpringyBot, which was designed by USD based on the LocoKit robotic toolkit. The robot was equipped with a mechanism to actively control the location of the centre of mass (COM). The aim was to identify how the COM in different positions and consequently a voluntary change in morphology influence the gait pattern and the overall behaviour of the robot. For the experiments we used a setup including even and sloped walkways. The robot was capable of moving in trotting and bounding gaits.Results show that the position of the COM has a strong influence on the locomotion repertoire of the robot. For instance, shifting the COM to the front can help the robot going up the slope while shifting the COM backwards facilitated going down the slope. This, for a robot being able to deal with uneven terrain an adjustable COM location seems to be favourable - in addition to other solutions - to stabilize the robot and to prevent it from falling.


2011 - Second Locomorph Robot Demo
The second robot demonstration and evaluation took place August 2011 in Jena. Main objective was the evaluation of the new robot hardware following the new Locomorph design principles. To detect the effects of the implemented design principles, we evaluated the robot gait patterns using a standardized gait analysis approach. The results were directly provided to the engineers who adapted control parameters of the robots as well as redesigned parts of the constructions based on these analysis outcomes. Adjacent to this robot evaluation we organized a public robot demonstration, where people outside of the consortium were invited.

The QuadSpringyBot build from LocoKit from the University of Southern Denamark (engineer: Jørgen Christian Larsen). In one set of gait analysis, we measured the robots ability to carry load and analysed the influence on the locomotion. Photo: Tino Zippel/OTZ Jena.
2010 - First robot demo of the Locomorph Group
In July 2010 the first robot demonstration was arranged in Jena. Goal of the demonstration was to test and evaluate our robot concepts. Hereto, we did a robotic gait analyses, measurements of the cost of transport, and tested the ability to locomote on different surfaces and inclined planes. Within the Locomorph project, the results of the robot evaluation are now part of a great discussion in order to find a concept for a new robot generation.
As a satellite meeting the workshop "Motion & Morphology" took place, where latest developments on locomotion and morphological aspect were presented. The workshop was a nice panel to collect new insights around gaits and adaptability in animals and humans. Invited speakers were Reinhard Blickhan, Koh Hosoda, Tony J. Presscott, Emanuel Andrada, Oskar von Stryk und Manfred Hild.
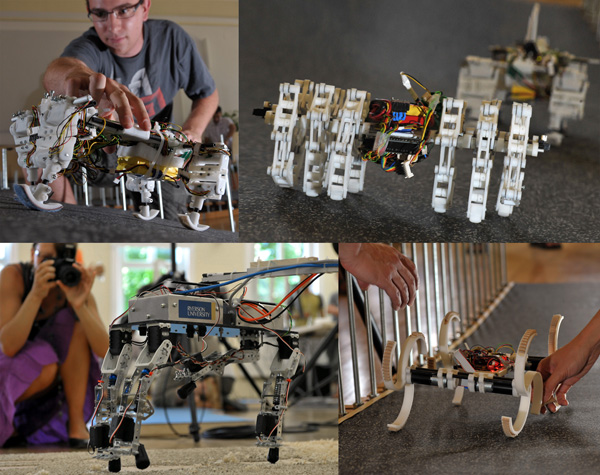
Upper left: The MiniQuad robot from the University of Zürich; Upper right: Theo Jansen robot from University of Zürich. This robot was inspired by the model of the Dutch artist and kinetic sculptor Theo Jansen.; Lower left: The GARP robot from Ryerson University, Toronto.; Lower right: Whegs – a four legged Rhex robot from the University of Zürich. All photos: Jan-Peter Kasper/FSU Jena
Past Activities
2009 In preparation of the first Demonstration (July 2010), beneficiary UJEN has designed and built a parcour. With this parcour, we can evaluate the ability of the robots to cope with different environments. The first version of this parcour is 4 meters long and 1 meter wide. Later, the size of the parcour will be extended to 6 m x 1.5 m. The ground level (height) can be easily adapted both in longitudinal and in lateral (sideways) direction with inclines of up to 30 degrees. Different surface materials can be applied to the parcour including wooden or stony structures, glued sand or roofing materials.
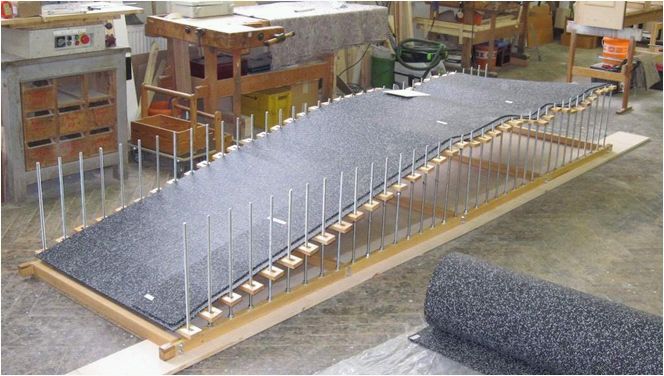
In preparation of this Demonstration, beneficiary UJEN has designed and built a parcour, as shown in Figure 26 08D0C9EA79F9BACE118C8200AA004BA90B02000000080000000E0000005F005200650066003200350035003600330038003100320032000000 . With this parcour, we can evaluate the ability of the robots to cope with different environments. The first version of this parcour is 4 meters long and 1 meter wide. Later, the size of the parcour will be extended to 6 m x 1.5 m. The ground level (height) can be easily adapted both in longitudinal and in lateral (sideways) direction with inclines of up to 30 degrees. Different surface materials can be applied to the parcour including wooden or stony structures, glued sand or roofing materials. The parcour will be presented at the review meeting in March 2010, such that all necessary modifications can be made until the first robot demonstration in July 2010.

