


Locomorph's goal is to push beyond the state of the art in robotic locomotion and movements, by increasing efficiency, robustness, and thus usability in unknown environments. As robotic research and industry are competing to increase robots' usability towards the highly-in-demand service robotics, advancements in robotic locomotion today would give Europe a significant competitive advantage. Locomorph combines multidisciplinary approaches from biology, biomechanics, neuroscience, robotics, and embodied intelligence to investigate locomotion and movements in animals and robots, focusing on two concepts: morphology and morphosis.
Morphology
The first concept, morphology, is based on the observation that successful biomimetic designs rely on effective embodiment: on clever morphology and use of material properties. Because of the ingenious forms, materials, and mechanisms selected by nature, animals can move efficiently and stably through virtually every conceivable terrain. When the animals' bodies undergo changes, either due to natural growth process or more extreme injuries such as limb loss, they gradually adapt and even 'invent' new ways of walking.
In this project, we will explore various morphological factors (shape, materials, sensors, compliance, limb segmentation, etc) to generate novel and optimal robotic designs for efficient and robust locomotion in unknown environments, based on insights from biological and biomechanical studies. We will iteratively build many diverse robots and co-develop control strategies while observing the robots in different environments in order exploit the complex dynamic which emerge from the interaction with the environment.
In order to support this morphology exploration, we will develop an infrastructure for enabling fast construction of robots with varying morphology, using a wide range of modular heterogeneous robotic components, such as legs and trunk/torso components with different shapes and materials, elastic elements, sensors, actuators with varying compliance, etc. This infrastructure will provide sharing of modular components (hardware and software) which enable fast construction of robots and an extensive collaboration among the consortium.
Morphosis
The second concept, morphosis, extends the concept of exploiting morphology further by investigating morphing, i.e. changing morphology. Voluntary morphosis – the ability to self-adjust own morphology – is a valuable skill for robots, as it can increase their adaptivity to current tasks and environments. Involuntary morphing is also a relevant issue, since it can occur in robots because of injuries or other external causes.
We will explore this topic using two complementary approaches. Firstly, we will conduct animal/human experiments to study biological strategies in dealing with voluntary/involuntary morphosis. In nature, morphosis occurs at various time scales.
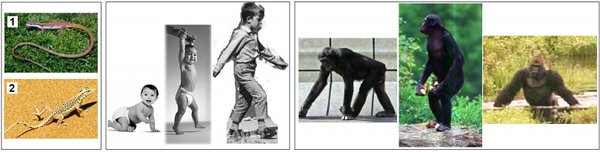
Very slow morphosis occurs during the natural selection process, where new morphology is adapted from an ancestral body plan due to new environmental constraints. For example, the Takydromus sexlineatus, a species of the lacertid lizard family, has a very slender elongated body and reduced limbs ideal for 'grass swimming', while the Meroles anchietae has long hind limbs, long slender toes, and a short stiff trunk ideal for fast running. However, perhaps this morphology is also used in a different way because the Meroles anchietae is also good in sand swimming in the desert. Morphosis also occurs within each animal's lifetime due to ontogenetic growth. Abnormal morphosis can also occur due to injuries, such as limb loss. Lastly, some animals sometimes perform an active form of morphosis, for example primates switch from quadrupedal to tri- or bi-pedal locomotion when holding an object.
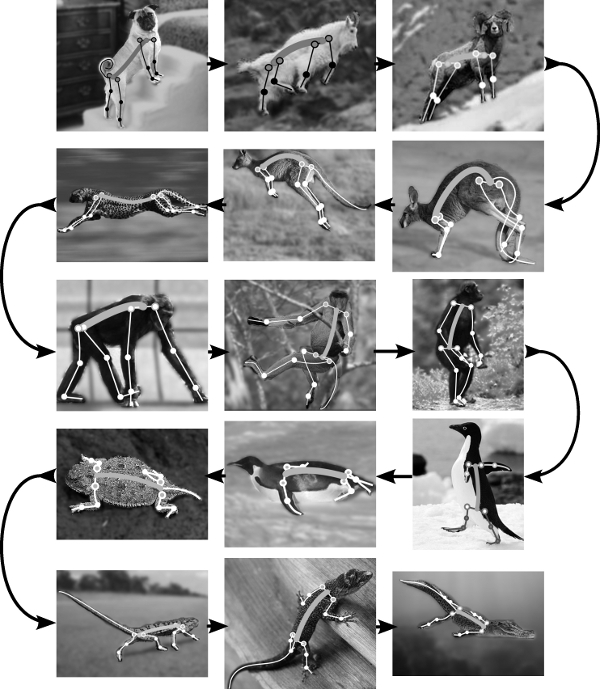
Secondly, we will extract insights from the results to investigate how to construct robots which can voluntarily morph (self-adjust their own morphology) during runtime to adapt to current task demands and environments, for example by lengthening and contracting their limbs, altering their overall shape by trunk/torso actuation, etc (see figure below for conceptual drawing of robotic voluntary morphosis). We will also develop motor control strategies for dealing with morphosis, both voluntary and involuntary. This, combined with the robot's modularity, will create highly robust robots, able to deal with body changes e.g. limb loss.
Through an exploration of these two concepts we aim to develop robots with increased maneuverability, self-stabilization, energy efficiency, and adaptivity to unknown environments. These advances will bring us closer to service robotics, as a large part of these robots must able to locomote safely, regardless of surfaces, layouts, or terrains.

