


During the summer school, the students were divided into seven groups performing a project each. On this page we showcase each project.
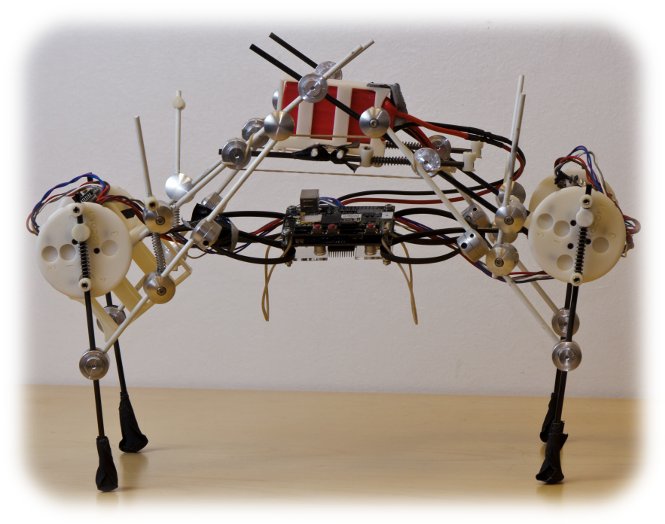
BipedalBoomBot:
Robots build with LocoKit have until now all had four legs. However, a group decided to build a bipedal robot with a slightly sprawling posture to see if they where able to recreate simulation results made with the M-SLIP model. The group attached the robot to a boom during the experiments.
In the end, the group did not succeed with their experiments. Both due to limitations with the LocoKit but also due to a lag of time.
This robot was built by: Harold Martinez (UZH), Christian Rode (Darmstadt), Frank Peuker (Darmstadt)
Caterpillar:
This group decieded to go all in and build a robot with 14 legs!
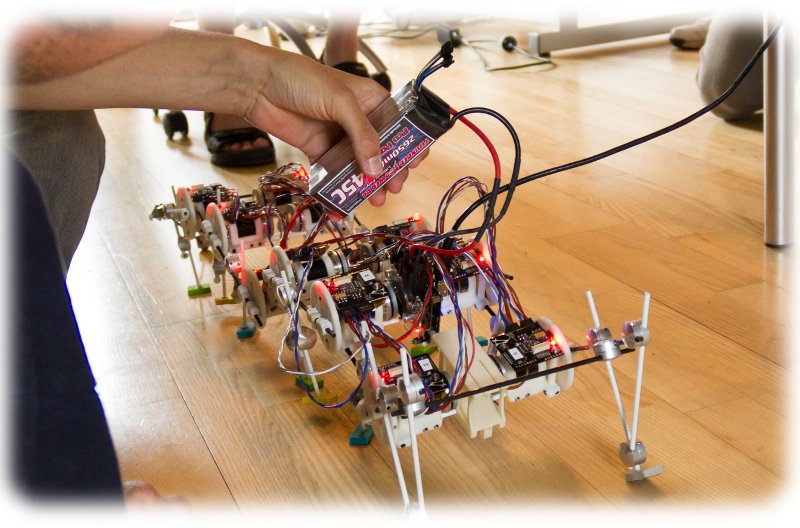
The robot moved nicely over flat surfaces using a traveling wave locomotion pattern.
The team behind this robot was: Melvin Gauci, Kees Voesenek, Elsa Quicazan, Camilla Jelen, Uros Cerkvenik, Bostjan Vihan, Caitrin Eaton
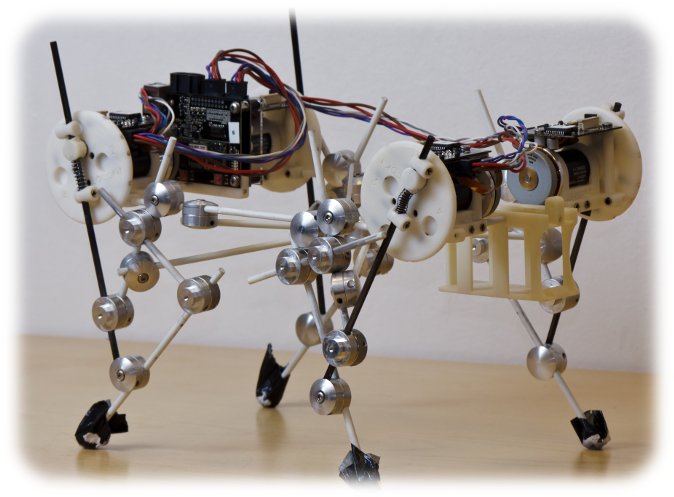
CheetahBot - Flexible Spine
This was one of two groups that wanted to study the effect of implementing a flexible spine in a robot. This group made a structure with LocoKit so they could stiffen the spine and thereby make it easier to compare a rigid and a non-rigid spine.
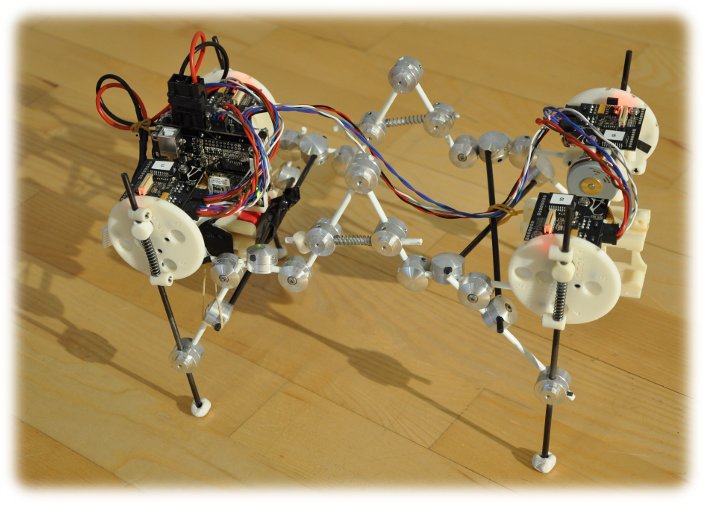
Experiments showed that the setup with the non-rigid spine had a higher forward motion speed than the one with the rigid spine. When looking at high-speed videos of the robot, it is also clear that the spine actively contribute to the locomotion pattern.
This robot was built by: Dominik Budday, Ludovic Daler, Kathrin Peyer.
CrutchSLIPwalker:
Inspired by passive dynamic walking robots, this group built this bipedal robot that would be balancing like the passive dynamic walker "Cornell Ranger". They also hoped to use the robot to demonstrate SLIP model-like walking patterns.
The robot never got to the point where it could ballance on its own within the time frame of the school even though the robot was rebuilt several times..
This robot was built by: Stefano Toxiri, Javier Martin
SpinyBot:
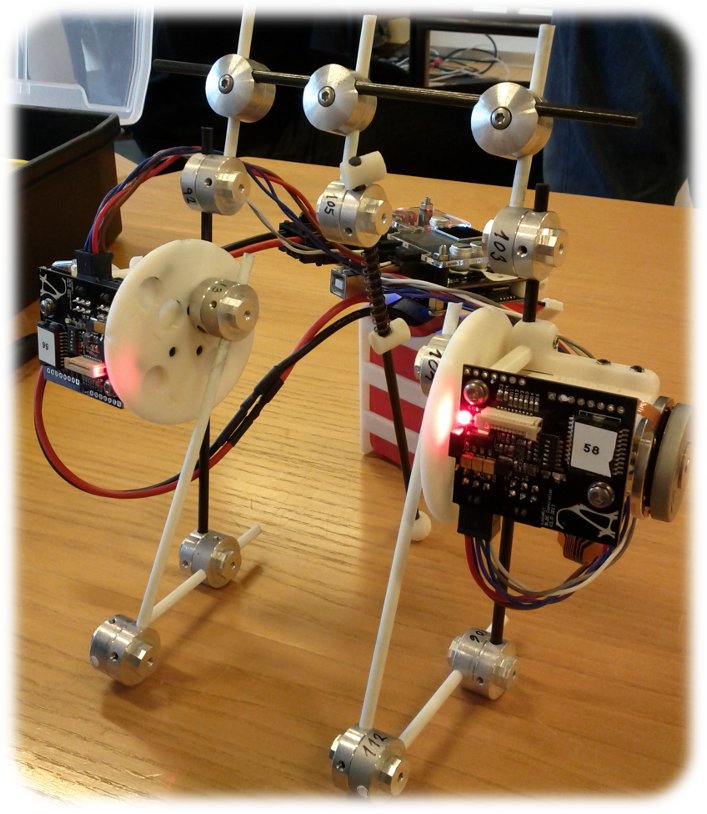
Yet another team wanted to see how the implementation of a spine in a quadruped robot would effect the walking ability of the robot. This team choose a different implementation than the other one, demonstrating the diversity of the LocoKit system.
In the end, this group was also able to show that the implementation of a flexiable spine in the robot had a positive effect on the performance of the robot.
This robot was built by: Geert Folkertsma, Louise Poubel, Susanne Stadler
Head Banger:
The final team explored how the change of center of mass effects the walking of the robot. The way they implemented this was by attaching a mass on a long rod conneced to a motor and then use the motor to position the mass either to the front or the rear of the robot.
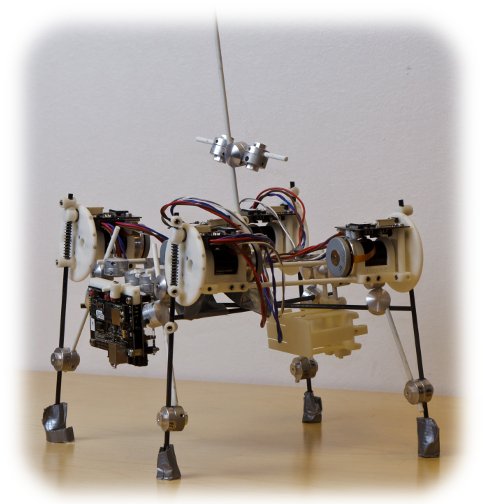
The team used the accelerometers in the robot to sense the tilt of the robot and based on this placed the mass accordingly.
The robot was built by: Avinash Ranganath, Toyotaka Kozuki, Jean-Marc Montanier, Wei Li
ConnectBot:
This group wanted to study if it was possible to create a leg mechanism with a linkage-bar structure using LocoKit. The group succeeded in doing this and after a few iterations a stable version was made.
Unfortunatly, time was not on their side, and they did not get to test the final and stable solution extensively, however, their effort still shows that it is possible to create linkage-bar mechanisms with LocoKit.
The robot was built by: Tomas Luneckas, Hamza Khan, Marc Deisenroth

