


Objectives
This work package examines strategies in various morphosis phenomena in animals and humans. The goal of this work package is:
(1) To study the ecological morphosis through natural selection in lacertid lizards and derive strategies for effective robotic morphosis in WP3.
(2) To derive a better understanding of morphological and mechanical adaptation, as well as suitable control mechanisms for voluntary and involuntary morphosis
(3) To synthesize the acquired model through computer simulation, and apply experimental results to aid in the development of robotic morphosis and control strategies in WP3 and WP5.
Deliverable 4.4 (July 2012)
Simulation and synthesis of movement and gait stability strategies based on
verified biomechanical models extracted from experimental results.

D4.4.1: Approach A - The M-SLIP model
-
D4.4.1.1: Involuntary morphosis-modular simulation of limb damage in quadrupeds. (Peuker F, Renjewski D, Groß M, Grimmer S and Seyfarth A, Proceedings of International Conference Dynamic Walking 2011, Jena, Germany, 2011). We investigate control strategies to stabilize quadrupedal trotting. Afterwards, we identify a strategy to keep the trotting mode while suffering from a sudden hind-limb damage.
-
D4.4.1.2: Leg-adjustment strategies for stable running in three dimensions. (Peuker F, Maufroy C and Seyfarth A, Bioinspiration and Biomimetics (2012) Vol 7 (3) 036002). In this journal publication, we show that stability of the 2D SLIP model, which describes human and animal running in sagittal plane, naturally extends to full 3D when the landing angle is defined with respect to velocity. Moreover, all three ground reaction force components as predicted from an inherently stable 3D SLIP model solution are in good agreement with experimental data. We further reveal that the 3D SLIP can inherently stabillize the heading direction and we present a dead-beat similar control to adjust it.
-
D4.4.1.3: Inheritance of SLIP running stability to a single-legged and bipedal model with leg mass and damping. (Peuker F, Seyfarth A and Grimmer S, BIOROB 2012). In this IEEE publication, we investigate in more detail how leg mass affects model morphology and dynamic behaviour of a running monopod and biped. Including leg mass is necessary to make forward dynamic predictions of the leg's swing phase. We show, that inherent stability, as previously identified for the 2D SLIP model, is also present and largely preserved if leg mass is added. The suggested control policy is a simple state machine and relies on a serial combination of motor and rotational hip spring. Optimal stiffness and landing angles with respect to energy efficiency are calculated for the applied control scheme.
D4.4.2: Approach B - Lizamander locomotion: Simulation and verification of sprawling gait
-
D4.4.2.1: Locomotion studies and modeling of the long-tailed lizard Takydromus sexlineatus. (Karakasiliotis K, D'Août K, Aerts P and Ijspeert AJ, BIOROB2012). This part reports on the simulation of locomotion in the intact long-tailed lizard, using systematic tests. Input data (morphometrics, performance) from the real animal are used. A good match between the real animal's locomotion, and the simulation is found.
-
D4.4.2.2: Studying morphosis with a simulated model of the long-tailed lizard Takydromus sexlineatus: tail amputation. (Karakasiliotis K, D'Août K, Aerts P and Ijspeert AJ). This part builds on the previous part and extends it in two ways: (1) by addressing the effects of tail morphosis and (2) by using a particle swarm optimization algorhythm. There is good correpondence between how the model and the real animal deal with tail morphosis.
-
D4.4.2.3: Experimental results on locomotion of the long-tailed lizard Takydromus sexlineatus: effect of substrate, slope, and tail morphosis. (D'Août K, Karakasiliotis K, Ijspeert AJ and Aerts P). This part analyses spatio-temporal gait characteristics under a range of conditons (tail morphosis, substrate type and slope) in the long-tailed lizard. Significant differences are found between several combinations of conditions (e.g. different combinations of stride length and frequency to achieve a specific speed) but are overall subtle.
-
D4.4.2.4: Kinematics in healthy and morphosed long-tailed lizards (Takydromus sexlineatus): comparison of a simulation model with experimental animal data. (D’Août K, Karakasiliotis K, Ijspeert AJ & Aerts P). This part specifically tests whether the key findings from the simulation (D4.4.2.2) are also observed in animal experiments. This is overall the case and the simulation model is therefore considered valid.
D4.4.3: Videos
Dog locomotion
Real world and simulations (Approach A)
|
real time Real-time video of a three-legged dog running with 3 m/s on a treadmill. |
real time / slow motion 4x Captured motion of a three-legged dog running with 2 m/s on a treadmill. |
real time / slow motion 4x Captured motion of a four-legged dog running with 3 m/s on a treadmill. |
|
real time / slow motion 4x Simulation of trotting (running) quadruped, 3 m/s. |
slow motion 4x Parallel video of simulated and real world dog using semi-transparent layer, 3 m/s. |





Lizamander locomotion
Real world and simulations (Approach B)
|
High-speed footage of a short-tailed long-tailed lizard (natural mutilation), see D4.4.2.2 (Karakasiliotis et al). |
High-speed footage of a healthy long-tailed lizard trotting on the level and on a slope of 23°. |
High-speed comparison of level locomotion in a healthy and a morphosed long-tailed lizard. |
|
Simulation output of a morphosed "Lizamander" . |
Simulation output of an intact "Lizamander". |





End of Deliverable 4.4
Current activities
Voluntary changes in pedality
In terms of morphosis, a voluntary change could be interpreted as temporal change of gait. An example for this, is quadrupedal locomotion in humans. We analyse quadrupedal gaits with respect to different centre of mass (CoM) positions (UJEN) and compare these findings with toddler and animal data (UANT).

Fig. 1: Subject performing quadrupedal gaits on an instrumented treadmill. Photo: Jan-Peter Kasper/FSU Jena.
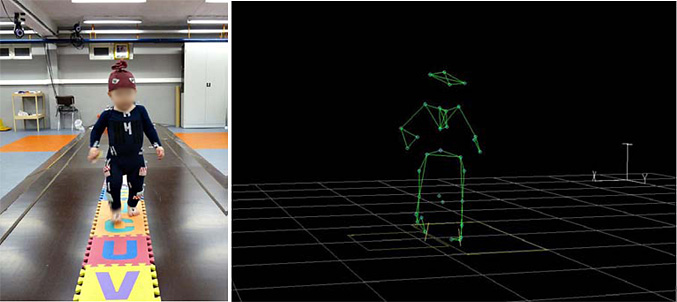
Fig. 2: Toddler on the experimental setup (left) and 3D kinematic reconstruction (right).
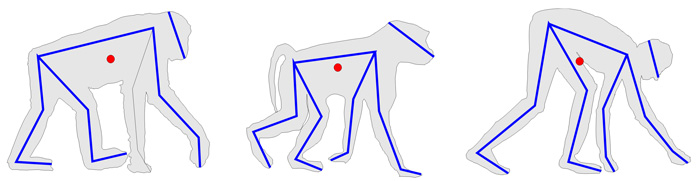
Fig. 3: Quadrupedal posture and location of the body's centre of mass in the bonobo (left), the olive baboon (middle) and in man (right).
Using high-speed infrared video devices we analyse gaits of dogs with fore- (FLA) or hind limb amputation (HLA) at different velocities. We are interested in strategies dogs use to compensate the lost limb. In close collaboration with UANT and EPFL we aim at identifying the underlying neuronal and mechanical mechanisms of three-legged locomotion.
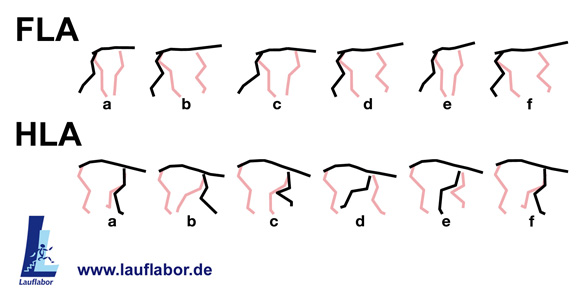
Fig. 4: Different leg orientations at touch down of the left hind limb (a to f) at 2 m/s of a dog with fore limb amputation (FLA) and hind limb amputation (HLA).

Fig. 5: Walking and trotting of healths four-legged dogs on a treadmill (1 and 2m/s) compared to observed gait patterns of three-legged dogs (HLA 1 to 3) at 1 and 2m/s on a treadmill.
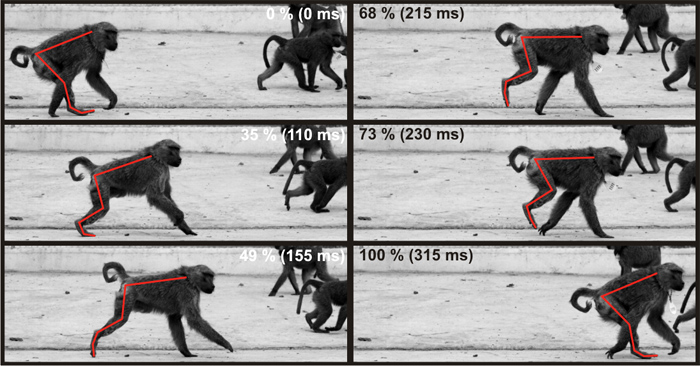
Fig. 6: Video stills showing one stride of a baboon (Papio anubis) with hind limb amputation (HLA).
Simulation of gaits
Humans and animals have a high leg mass. For instance, 32% of the human body mass is covered with both legs. Therefore, legs are expected to have a strong influence on gait stability. The common template model for running and walking, the spring-loaded-inverted pendulum (B-SLIP, Geyer et al., 2006), is lacking leg inertia and a successful guide of robot design is unlikely.
Thus, we add leg inertia to the B-SLIP, to synthesize a model (BM-SLIP) that combines both, the centre of mass dynamics for running and walking and leg dynamics for swing and stance. Currently, simulations are performed with respect to different morphologies and different control approaches (EPFL).
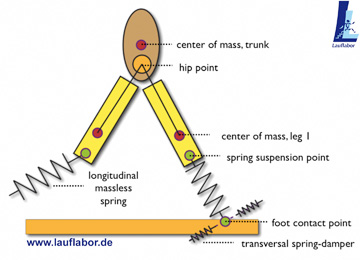
Fig. 7: Bipedal extended spring-mass model with trunk and leg segment masses (BM-SLIP).
Ecological morphology of lizard locomotion
We are gathering high-speed video data and performing analyses of lacertid lizards - both "generalised" and "specialised" species. The subjects' locomotor kinematics are compared between species, and between substrate types. This will allow us to evaluate morphosis through natural selection. In addition, body morphometic data and experimentally determined friction data (UANT) are fed into forward dynamics models (EPFL).

Fig. 8: Still images from a dynamic simulation of a "lizamander" robot (top row) and the biological inspiration, Takydromus sexlineatus (bottom row). A and B, dorsal view, C,D, pseudolateral views.
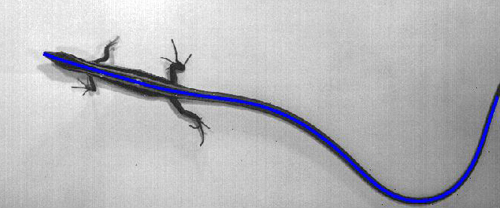
Fig. 9: Dorsal-view video still of Takydromus sexlineatus, with superimposed the auto-tracked axial midline.
Stiffness measurements during human hopping
We have measured stiffnesses of the total system during hopping on two substrates, hard and soft, as a function of hopping frequency (Figure 10). Results are being fed back to Work Package 3 and will aid the constuction of a variable-stiffness robotic leg that should function on various substrates.

Fig. 10: Normalised (to body mass) stiffness of the entire system (body + substrate) during hopping at different frequencies.

